Elevator Syndrome Part Ii
ELEVATOR SYNDROME PART II
Another Look at How Motorcycles Respond to the Twist Grip.
Steve Anderson
Wrong! That’s what the explanation of shaft-drive suspension movements in last May’s Cycle World was. The èxcuses don’t make for good reading.
For those fortunate enough to have missed it, the article, The Elevator Syndrome, explained that shaft drive bikes lift their hind ends when power is applied not because of the torque reaction of the ring and pinion, but because of swing arm angularity. Not long after, the letters began to arrive. They were from engineers and physicists and people who had thought about motorcycle suspension. Even watching a shaft-drive bike with a horizontal swing arm demonstrates the article was wrong. Not all the letters agreed, however, on what does cause a shaft-drive bike to jack-up the back end when the throttle is opened, and lower the back end when the throttle is closed.
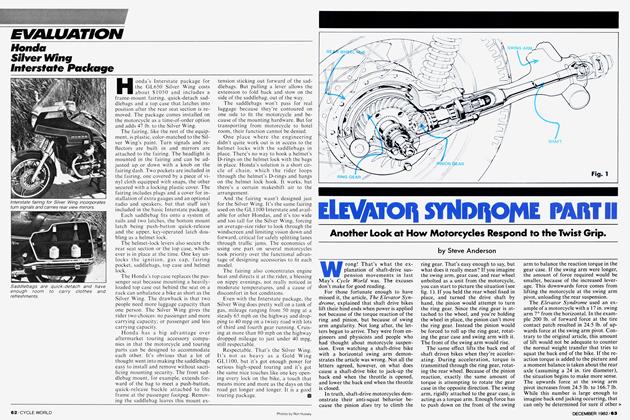
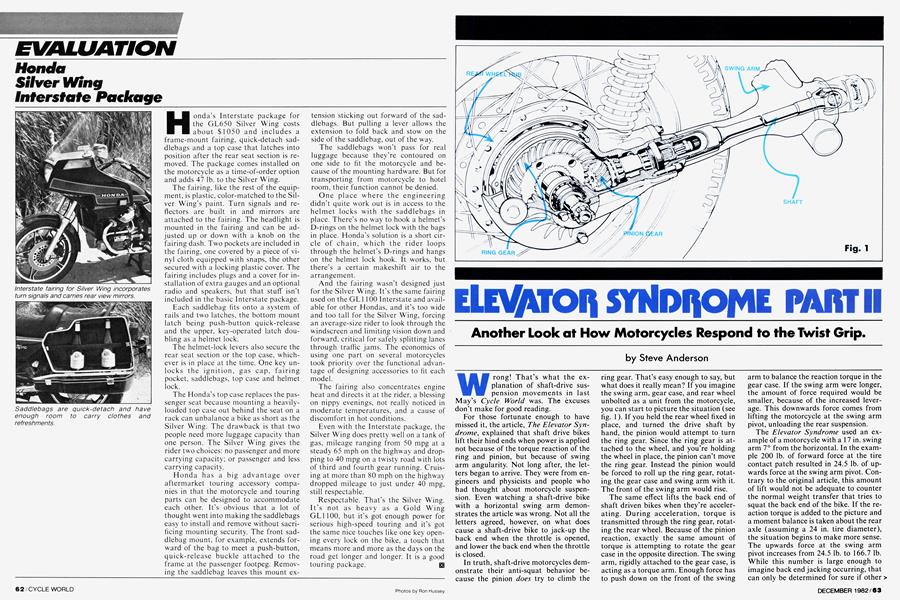
In truth, shaft-drive motorcycles demonstrate their anti-squat behavior because the pinion does try to climb the ring gear. That’s easy enough to say, but what does it really mean? If you imagine the swing arm, gear case, and rear wheel unbolted as a unit from the motorcycle, you can start to picture the situation (see fig. 1 ). If you held the rear wheel fixed in place, and turned the drive shaft by hand, the pinion would attempt to turn the ring gear. Since the ring gear is attached to the wheel, and you’re holding the wheel in place, the pinion can’t move the ring gear. Instead the pinion would be forced to roll up the ring gear, rotating the gear case and swing arm with it. The front of the swing arm would rise.
The same effect lifts the back end of shaft driven bikes when they’re accelerating. During acceleration, torque is transmitted through the ring gear, rotating the rear wheel. Because of the pinion reaction, exactly the same amount of torque is attempting to rotate the gear case in the opposite direction. The swing arm, rigidly attached to the gear case, is acting as a torque arm. Enough force has to push down on the front of the swing arm to balance the reaction torque in the gear case. If the swing arm were longer, the amount of force required would be smaller, because of the increased leverage. This downwards force comes from lifting the motorcycle at the swing arm pivot, unloading the rear suspension.
The Elevator Syndrome used an example of a motorcycle with a 17 in. swing arm 7° from the horizontal. In the example 200 lb. of forward force at the tire contact patch resulted in 24.5 lb. of upwards force at the swing arm pivot. Contrary to the original article, this amount of lift would not be adequate to counter the normal weight transfer that tries to squat the back end of the bike. If the reaction torque is added to the picture and a moment balance is taken about the rear axle (assuming a 24 in. tire diameter), the situation begins to make more sense. The upwards force at the swing arm pivot increases from 24.5 lb. to 166.7 lb. While this number is large enough to imagine back end jacking occurring, that can only be determined for sure if other > details of the motorcycle are known. For fig. 2 the necessary assumptions about the motorcycle have been made, and with these fairly typical weight distributions and dimensions, the motorcycle will rise during acceleration.
When the exact amount of rise and the behavior of the rear suspension have to be known, the relatively simple world of static analysis is left behind, and the dynamic behavior of the motorcycle has to be studied. The situation rapidly becomes more complicated. The force accelerating the motorcycle is no longer constant, but varies with speed. Shock damping enters into the picture, restricting the rate at which the rear suspension can extend. If the suspension is fairly soft, changes in acceleration lead to substantial changes in the rear shock load, causing large swing arm movements that could further increase the jacking tendency. Despite these complications, generalizations can be made about the behavior of conventional shaft-drive motorcycles. First, increased swing arm length reduces the anti-squat effect. Second, high power-to-weight ratios, and operation in the lower gears, amplify the effect because of the increased torque transmitted. Third, softly sprung motorcycles react more to changes in suspension loading than do more stiffly suspended bikes. Finally, given the range of swing arm angles on current shaft-drive motorcycles, the swing arm angle is less significant than swing arm length or rear spring rate in determining the bothersomeness of anti-squat behavior.
Our original article also explained why the aft ends of chain driven bikes stay down during acceleration. Hopefully you missed that explanation also. It wasn’t right either. The article claimed that swing arm angularity was the villain just as for shaft drives, but fortunately the chain pull on the top of the sprocket counteracted the jacking. The problem with this explanation is that the sprocket can’t transmit a bending moment to the swing arm because of the bearings in the wheel hub. Actually, the swing arm is what engineers refer to as a pinned link. Both ends of the swing arm are mounted in bearings, so the only forces that can be transmitted through it without rotating things have to be along the swing arm axis. Any road race observer could come up with some real world counter examples to the claim that chain-drive bikes don’t jump up on acceleration. At this year’s Laguna Seca race, every Formula I bike, from Robert’s 500cc GP Yamaha to Cooley’s lOOOcc Suzuki four-stroke, accelerated out of the slow turn Nine with their suspension against the topping stops. Watching chain driven street bikes accelerate presents less clear cut examples, but the intriguing thing is how little the suspension moves in either direction. When the front wheel is hovering just off the ground and the rear suspension still isn’t compressed, something else must be loading the rear wheel besides the rear springs.
The real explanation can be seen by studying a free body diagram of the rear wheel (figure 3). In this diagram, the wheel is shown by itself, and instead of the mating parts, just the forces holding the wheel in equilibrium are indicated. Notice that both the chain force and the swing arm force are angled downwards slightly. Separated into horizontal and vertical components, the chain and swing arm forces can be seen to push the rear wheel down with a force of 129.5 lb. A look at the main frame of the motorcycle would show a case of mirror symmetry, with the same forces lifting it at the swing arm pivot and the countershaft.
The total load on the rear wheel comes from the downwards components of the chain and swing arm forces, and the spring load supporting the back of the bike. We can calculate what this load must be by looking at the weight transfer that occurs during acceleration. The weight transfer is caused by the acceleration force at the bottom of the rear tire being located about 2 ft. or so below the center of gravity of the bike and rider, so the motorcycle tries to pivot on the rear tire. Suspension movement, except as it affects the center of gravity, doesn’t affect the amount of weight transfer. If the weight transfer for a given acceleration is less than the downwards load from the chain and swing arm forces, the spring force contribution to the rear wheel loading has to decrease, and the back of the bike will rise.
If the shaft driven bike shown in fig. 2 were converted to chain drive, 200 lb. of force accelerating it would still result in a weight shift to the rear wheel of 83.3 lb. Since the load increase on the rear wheel from chain and swing arm forces is 129.5 lb., the spring contribution would have to drop by the difference, and the rear end would rise. This rise would be less than for the shaft driven version, where the load increase on the rear wheel from the torque reaction and swing arm force was 166.7 lb. If the chain angle were reduced (perhaps by an internal gearing change and a larger countershaft sprocket) to 1 ° (see fig. 4), the load increase on the rear wheel from the chain and swing arm forces would fall to 108.6 lb., and movement of the back end would be almost imperceptible. By moving the location of the swing arm pivot up or down to vary the swing arm angle, almost any desired effect could be obtained. Interestingly enough, Yamaha has commissioned multi-adjustable chassis for its fiat track effort, and the team tuners have discovered that the adjustment that most affects handling is the swing arm pivot height.
To summarize about chain-drive bikes' reaction to acceleration: First, just as for shaft driven motorcycles, the effects are magnified by increased power, the larger forces available in the lower gears, and softer suspension. Second, most chain driven street bikes do not exhibit dramatic rear suspension reactions to acceleration. Finally, chain drive bikes anti-squat characteristics are affected by gearing changes and suspension movement, and, at least in the design stages, are far more tunable than conventional shaft drives. O